참고 사이트
https://wiki.dfrobot.com/HUSKYLENS_V1.0_SKU_SEN0305_SEN0336libraries 폴더 안에 있는 폴더(메카넘 휠 사용, 허스키렌즈 사용 라이브러리)들을 아래 폴더로 복사하여 라이브러리를 사용할 수 있도록 준비함 C:\Users\사용자 계정\Documents\Arduino\libraries
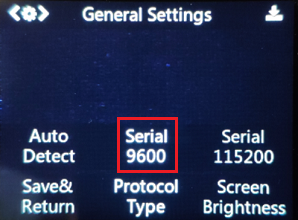
허스키 렌즈 세팅에서 통신속도를 설정함
허스키 렌지의 Object Tracking에서 하나의 타겟을 설정함
- 아두이노 IDE를 새로 실행하여 아래 코드를 실행함
#include "HUSKYLENS.h" #include "SoftwareSerial.h" HUSKYLENS huskylens; SoftwareSerial mySerial(2, 3); // RX, TX void setup(){Serial.begin(115200); mySerial.begin(9600); while (!huskylens.begin(mySerial)){Serial.println(F("Begin failed!")); Serial.println(F("1.Please recheck the \"Protocol Type\" in HUSKYLENS (General Settings>>Protocol Type>>Serial 9600)")); Serial.println(F("2.Please recheck the connection.")); delay(100)} } void loop(){if (!huskylens.request()) Serial.println(F("Fail to request data from HUSKYLENS, recheck the connection!")); else if(!huskylens.isLearned()) Serial.println(F("Nothing learned, press learn button on HUSKYLENS to learn one!")); else if(!huskylens.available()) Serial.println(F("No block or arrow appears on the screen!")); else{while (huskylens.available()){HUSKYLENSResult result = huskylens.read(); printResult(result)} } } void printResult(HUSKYLENSResult result){if (result.command == COMMAND_RETURN_BLOCK){Serial.println(String()+F("Block:xCenter=")+result.xCenter+F(",yCenter=")+result.yCenter+F(",width=")+result.width+F(",height=")+result.height+F(",ID=")+result.ID)} else if (result.command == COMMAND_RETURN_ARROW){Serial.println(String()+F("Arrow:xOrigin=")+result.xOrigin+F(",yOrigin=")+result.yOrigin+F(",xTarget=")+result.xTarget+F(",yTarget=")+result.yTarget+F(",ID=")+result.ID)} else{Serial.println("Object unknown!")} } 시리얼 모니터를 통해 설정한 타겟이 인식되었을 때 입력되는 정보를 확인하고 필요에 따라 수정함
허스키 렌즈의 해상도는 320*240